Underwater Remote Operated Vehicles (ROV) are robots that humans have designed over years of research and practice in order to assist any global community with research efforts. They are mostly used in different applications to do work that has obstructions that would not be easily accomplished by humans. These ROVs can be tethered or not with a cable that transmits any type of information to or from the ROV. Tethering is up to the discretion of the user and for the purpose of what it will be used for. ROVs assist us in real world applications and are equipped with tools and accessories such as the cameras, lights, arms, claws, rotational motors, protrusions, and accommodated with useful tools such as sensors. These ROVs are able to supply us with a useful threshold of knowledge that may be more tangible on land where there are no physical limitations to our mobility or obstruction to do work. This also allows work to be conducted at a faster rate of completion and with utmost efficiency.

Above: Saab Underwater ROV From Seaeye.com
Today, ROVs are sold by numerous popular manufacturers including Saab (Pictured above) and they supply them to “oil and gas industries, security companies, salvage and dive support, yacht club or marina industry, inshore and offshore operation, inspections, environmental work, deep tunnel penetration and survey operations.” (Seaeye.com)
With the availability of technology around and the application and use of these ROVs in real world scenarios, we are able to accomplish much more than we ever could have in quicker amounts of time. These ROVs are fundamental for development in our technologically changing world and in the ever-increasing research documentation being taken to this date.

Our task with SeaPerch is to do three tasks: Stop the flow of a simulated oil spill, cap the well, and to collect the oil on the surface. these three tasks will be accomplished by myself and two other team mates, DM and SR. Dividing vital roles to each member, the group came to consensus that I will be the electrical engineer, DM will be the civil engineer, and SR will be the mechanical engineer. Together, we will unite our individual systems to one ultimate design.



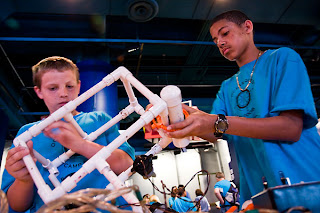
Above is an example of an ROV Made out of PVC Pipe and achieved the goal of making a useful, practical Remote Operated Vehicle under a limited / efficient budget.

Above: The Task assigned over the YouTube Challenge Page from SeaPerch Inc. (Seaperch.com)
Above: SeaPerch logo with "Teach, Build, Become" Logo from Seaperch.com
--------------------------------------------------------------------------------------------------------------------------------------
ROVs are usually deployed by ships or vessels and used in the Research Field. This is how they are utilized and how people in today's workforce make use of them
 Above is an image of people preparing an ROV and checking all vital components for efficiency and calibrating all components for most accurate measurements of oceanic data.
Above is an image of people preparing an ROV and checking all vital components for efficiency and calibrating all components for most accurate measurements of oceanic data.



Above: Some university students have smaller scale ROVs or ones that they have prototyped themselves. This field study and experimentation allows them to compare their measuring equipment against other manufacturer professionally made ROVs. using this difference in data, they can further develop and improve their ROV for more practical use in the work-force.
--------------------------------------------------------------------------------------------------------------------------------------
The Research the Underwater ROVs Conduct and ROVs in Action.

 Above is the ROV Odyssey. Starting off as a small company, they have built up a large title for themselves in the ROV-World. Utilizing things such as microphones, lights, indicator lights, cameras, arms, accessing numerous axis of movement, accurate and nearly instantaneous feedback, Odyssey is becoming a larger name in the demanding world for Remote Operated Vehicles.
Above is the ROV Odyssey. Starting off as a small company, they have built up a large title for themselves in the ROV-World. Utilizing things such as microphones, lights, indicator lights, cameras, arms, accessing numerous axis of movement, accurate and nearly instantaneous feedback, Odyssey is becoming a larger name in the demanding world for Remote Operated Vehicles.



 Above: Some pupils learn in hands-on workshops that expand their knowledge and experience features not usually expressed in normal textbook study. This method of approach in education is new, revolutionary, and designed to be more efficient and to have students think with a new aspect of their brain.
Above: Some pupils learn in hands-on workshops that expand their knowledge and experience features not usually expressed in normal textbook study. This method of approach in education is new, revolutionary, and designed to be more efficient and to have students think with a new aspect of their brain.




The British Petroleum Accident, Experiment, and the Solution
 As we all know, the British Petroleum company had a fuel leak that occurred on May 24, 2010. Considering that we needed tools and equipment underwater that exceed human performance, the increased demand in underwater ROVs became very apparent.
As we all know, the British Petroleum company had a fuel leak that occurred on May 24, 2010. Considering that we needed tools and equipment underwater that exceed human performance, the increased demand in underwater ROVs became very apparent.

 With the assistance and aid of ROVs, people were able to obtain 24 hour feed of the oil spill from different perspectives as if somebody was actually there. This surpasses human capabilities and proves extremely useful in real world situations.
With the assistance and aid of ROVs, people were able to obtain 24 hour feed of the oil spill from different perspectives as if somebody was actually there. This surpasses human capabilities and proves extremely useful in real world situations.
 Beaches were devastated with oil remnants and lots of marine species were not able to survive. This was a natural tragedy abusing fuel consumption without international regulations. Without these regulations, everybody should have equipment to utilize underwater and perform tasks as required.
Beaches were devastated with oil remnants and lots of marine species were not able to survive. This was a natural tragedy abusing fuel consumption without international regulations. Without these regulations, everybody should have equipment to utilize underwater and perform tasks as required.
 Above is an example of oil pooling in a marsh. A lot of this cleanup could have been avoided with improved technology and ROVs being used efficiently and having them on hand prepared for a scenario like this.
Above is an example of oil pooling in a marsh. A lot of this cleanup could have been avoided with improved technology and ROVs being used efficiently and having them on hand prepared for a scenario like this.
 Above: This is an example of the small task at hand that they had to accomplish. They just had to find a proper part, manipulate it and bolt it down. We all know how devastating it was when scientists couldn't cap the well for numerous days. In today's society with the amount of resources we utilize underwater, it is necessary that we find out what we can do with Underwater ROVs and use them to the best of our ability.
Above: This is an example of the small task at hand that they had to accomplish. They just had to find a proper part, manipulate it and bolt it down. We all know how devastating it was when scientists couldn't cap the well for numerous days. In today's society with the amount of resources we utilize underwater, it is necessary that we find out what we can do with Underwater ROVs and use them to the best of our ability.
--------------------------------------------------------------------------------------------------------------------------------------
ROVs in the Work Force / Aesthetic Appeal to Consumers

 Above is another image of a scientist doing sea-grass analysis which is another field of research ROVs are useful for.
Above is another image of a scientist doing sea-grass analysis which is another field of research ROVs are useful for.

 Above is a picture of scientists evaluating samples from an Underwater ROV collection system. They are exposing it to ultraviolet light to kill any type of bacteria or contamination on the sample to observe for microscopic speculation.
Above is a picture of scientists evaluating samples from an Underwater ROV collection system. They are exposing it to ultraviolet light to kill any type of bacteria or contamination on the sample to observe for microscopic speculation.
 Major end users of these products and the projected aesthetic appeal of this project includes the United States Military and the United States Navy. Considering the professionalism that they hold in their profession with uniforms, regulations, standards, procedures, and common practices, the equipment they utilize should bear the same professionalism. Our objective is to capture this quality of work in the design of our ROV.
Major end users of these products and the projected aesthetic appeal of this project includes the United States Military and the United States Navy. Considering the professionalism that they hold in their profession with uniforms, regulations, standards, procedures, and common practices, the equipment they utilize should bear the same professionalism. Our objective is to capture this quality of work in the design of our ROV.


--------------------------------------------------------------------------------------------------------------------------------------
ROVs are usually deployed by ships or vessels and used in the Research Field. This is how they are utilized and how people in today's workforce make use of them
 |
| Above is a conceptual image produced on a rendering application showing how an Underwater ROV may be deployed in the ocean from a vessel. |

Above: Using cables and lines to balance the ROV, some of the devices have to be placed in at angles and sometimes the ROV has to be deployed at an angled condition for optimal use. Usually inflatable boats are used to maneuver the ROV from the ocean while members aboard the ship prepare it for its voyage.
Above is an example of a person deploying an industrial large scale Underwater Remote operated vehicle. Fishing ships and information retrieving vessels use GPS coordinates and measurements from the ROV to gain as much information possible about oceanic locations. This is the equivalent of labeling streets on land as we would label oceanic qualities to GPS coordinates.
Above: Some university students have smaller scale ROVs or ones that they have prototyped themselves. This field study and experimentation allows them to compare their measuring equipment against other manufacturer professionally made ROVs. using this difference in data, they can further develop and improve their ROV for more practical use in the work-force.
--------------------------------------------------------------------------------------------------------------------------------------
The Research the Underwater ROVs Conduct and ROVs in Action.

Above is an example of an Underwater Remote Operated Vehicle that is utilizing a tether and taking advanced data from numerous pieces of equipment. It is using "headlights" or halogen lamps to illuminate the area, It is using at least 3 motors for all axis of movement. Its using instant camera feedback so that information of where it is at can be sent back to the operation area for recording and adjustments.
Above: This is the Saab manufactured Underwater Remote Operated Vehicle that is observing marine life. This is important and crucial to take advantage of because some animals may be too dangerous to observe first hand and they also might act differently when approached by a human as opposed to a robot. What should be taken into consideration is the fact that with the advancement in camera technology, we can even observe marine life at distances unmatched by any human potential.
Above: Divers utilize ROVs as moveable operable toolboxes. They can utilize any of its components and manually control it from a remote location already underwater to figure out certain type of data useful in laboratories and other facilities. Here is an example of a diver utilizing a Home Build ROV for research.

Above: Many companies test Underwater Remote Operated Vehicles in large scale tanks. Above is a 650,000 gallon research tank with side observation glass. This allows testing members and researches to communicate to engineers as to what the task is that they need to accomplish. In addition, the engineers test their existing product and take down notes as to how they can improve it for the future. Critical things such as how it sits in the water and how it maneuvers about in the testing facility is important because in a real life scenario there may not be as much open space to work with.

Above: Students in Universities, Colleges, and Prestigious high schools alike work on building ROVs. As part of a marine class or engineering class, they have a task which they have to accomplish. Teachers analyze the students efficiency, intuition, and ability to think outside of the box. These projects are the building blocks to positive advanced thinking for the minds of our future engineers. The rate at which technology is learned and manipulated is so unfathomable because instantaneous reports of their breakthrough ideas are passed to laboratories for utilization immediately while the students are studying for the future.


Above: Because ROVs are so crucial to the research department, there is a lot of scholarship and merit based opportunities for students to utilize and create the best designs. Considering that money is out of the factor for all of the designs, companies will look for inspiration, motivation, engineering new ideas, and utilizing things never foreseen before.

With recent rendering applications and with money being a factor in some scenarios, these programs allow us to see a 3-dimensional analysis of what is possible and how we can manipulate it. It gives everybody insight and a realistic design at no cost and makes designs very efficient and easily changeable with versatile layouts.
Above: This is an image explaining how data will be transmitted from this particular vessel. Using a 2 stage tethering system, they believe they will have more maneuverability and more efficiency is available to them. Their Underwater ROV was used mostly on the ocean floor and used to document photographs, test oceanic principles, and collect samples on the ocean floor for evaluation and composition research.

Above is an example of an Automated Rendering of the type of work done underwater. There are a few different types of equipment, some static and some maneuverable. This will allow them to do a lot of extensive research on the ocean floor for fish stock assessment, determining the extreme values that marine animals can live in on the ocean floor, and noticing trends occurring over time.
--------------------------------------------------------------------------------------------------------------------------------------The British Petroleum Accident, Experiment, and the Solution





--------------------------------------------------------------------------------------------------------------------------------------
ROVs in the Work Force / Aesthetic Appeal to Consumers

Above is an image of a Marine Scientist measuring the size of coral using a large-scale caliper. Underwater ROVs are used for intensive scale research and should be taken in a serious scientific matter.


Scientists evaluate samples collected from sea grass in laboratories and speculate them to extensive materials to discover different properties of its composition and function in the marine ecosystem.

Other examples of end-users and aesthetic desire includes Marine Engineers. They are technicians or people who envision modifications to the existing hardware and use it for the future. Their level of professionalism and class is equally represented by their difficult work ethics.

This is one primary example of laboratory study, evaluation, and monitoring of a Remote operated Vehicle from within the inside of a Submarine. Considering the size is significantly smaller, and the increased maneuverability of such a unit, a ROV is much more compatible for their needs.
Overall, aesthetics are vital when taking in the whole picture. The whole picture is the end user, who would the consumer be, for what purpose would they use it, and it is held up to our expectations to bear the same level of professionalism that they hold in the work force. Considering that this level of work is very intricate and usually requires a higher level of education and professionalism, we should put in a lot of effort into designing the ROV with them in mind.
Additional Information:
The Underwater ROV the team has to design and construct has been broken down into three vital roles. My partner DM is taking the challenge of designing the most optimal hull for our situation. My other partner SR is designing an efficient but effective arm to be used during the competition. My personal job between my teammates is to configure the electronics so that they work effectively underwater and create a control box that would allow for all axis of movement to be natural, precise, and accurate. Following the construction of previous Underwater ROVs in the past and following the challenge the Class of 2011 competed in, my team has brainstormed many possible designs for the task to be accomplished effectively. My input towards the design was that the ROV should have a control box with all inputs and outputs on it for effective transmitting of data and universal plugs to be used at the competition and any test site we may encounter. For the internal electronics of the ROV, they should consist of an easily maneuverable controller that may be plugged in during the competition and used to control the ROV in all three axis of motion necessary for the tasks to be completed. The controller has to be wired up to a serial Arduino Microcontroller underneath the base of the control box. The Arduino Microcontroller is capable of transmitting sixty-four pins of data across a two wires, input and output data. It is capable of being the brain for voltage conversion necessary for operation, motor control and speed, understanding and communicating with the controller for effecting handling and maneuverability. Video may also be streamed across the Arduino to simplify any camera processes that we may have during the challenge and can be uploaded to any S-Video compatible television set.
Onboard the ROV would be 2 parallel bilge pump motors capable of accepting different amounts of voltage for speed control. The camera will be mounted in a waterproof housing and will have wires leaving the enclosure going to the surface. The Arduino and additional electrical components such as breadboards for converting voltage would be onboard the ROV in a waterproof enclosure. These enclosures are rated for one-hundred feet deep dives and provide sufficient needs for the requirement of the project.